Leicht – und sich durch die Luft schrauben: das war auch schon die Idee von Leonardo da Vinci,wie die bekannte Skizze beweist:
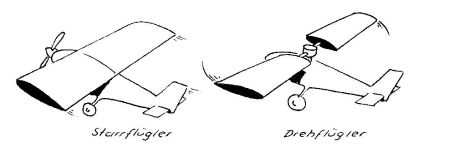
Bis zur Realisation des heutzutage nicht mehr wegzudenkenden Hubschraubers bedurfte es unzähligen Versuchen und Entwicklungen. Dabei scheint technisch kaum ein Unterschied zu bestehen zwischen dem Starrflügler, der sich nur mit Vorwärtsfahrt im Luftmeer behaupten kann und dem Drehflügler, der in sämtliche Richtungen fliegen kann und auch senkrecht manövrierbar ist. Eines kann jedoch nur er: in der Luft stehen bleiben.
02
03
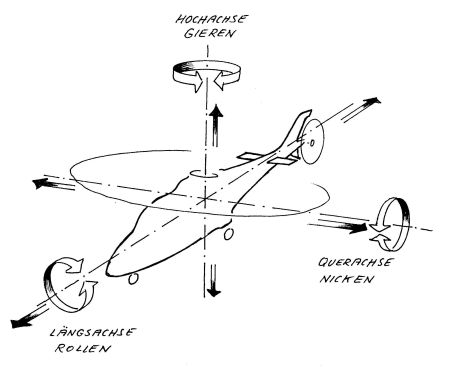
Der „interne“ technische Aufwand ist sehr komplex, jedoch auch für den Nicht- Hubschrauberflieger erfassbar. Während das Starrflügelflugzeug durch Fahrt mit seinen profilierten Flächen Auftrieb erhält, liefert beim Helikopter die rotierenden Auftriebsflächen – die Rotorblätter – die aufwärts gerichteten Kräfte. Bekanntlich lässt sich das Flugzeug um drei Bewegungsachsen aerodynamisch steuern, ebenso der Hubschrauber, der sich auch zusätzlich entlang dieser Achsen verschieben kann.
Diese enorme Beweglichkeit erfordert intensives Training und tiefe Kenntnis der Einsatzmöglichkeiten.
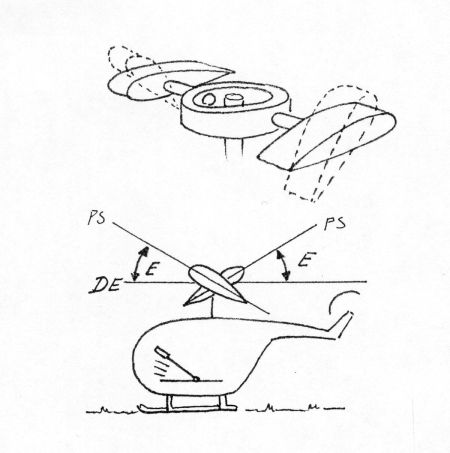
Der Rotor selbst funktioniert wie ein verstellbarer Propeller, mit dem der senkrecht wirkende Auftrieb variiert wird. Dies geschieht mit dem „Pitch“, einem separat mit der linken Hand zu bewegendem Hebel. So wird die Höhe z.B. über dem Boden kontrolliert. Diese Auftriebsleistung kann auch innerhalb der Rotorkreisfläche unterschiedlich verteilt werden. Hierzu können die Rotorblätter unabhängig einzeln „verdreht“ werden.
04
05
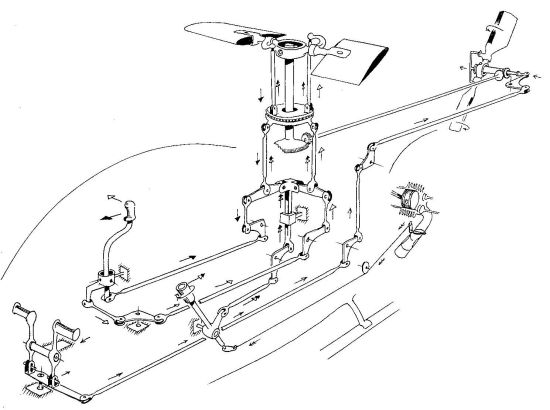
Die der Propellerverstellung ähnliche Einstellmöglichkeit wird „kollektive“ Steuerung genannt, gleichzeitig und gleich groß. Die während des Umlaufs gewährte Verstellmöglichkeit wird „zyklische“ oder „periodische“ Steuerung genannt. Durch letztere kann die gesamte Rotorkreisebene in die beabsichtigte Flugrichtung geneigt und dadurch Fahrt aufgeholt werden.
Die komplizierte Steuerung ist in der nächsten Abbildung stark vereinfacht dargestellt. Die Skizze beinhaltet auch die Steuerung eines weiteren Rotors, der für den Ausgleich des Drehmoments sorgt. Sobald der Hauptrotor in Umdrehung versetzt wird, äußert sich das Rückdrehmoment, welches den Rumpf in Gegenrichtung bewegen will. Diese Tendenz wird durch den hinteren Ausgleichsrotor kompensiert. Auch dieser Propeller ist über die Fußpedale verstellbar und ermöglicht Drehungen um den Rotormast.
06
07
Über den Steuerknüppel lenkt man analog zum Flächenflugzeug die Fluglage bezüglich der Nickbewegungen sowie der Schräglage wie z.B. im Kurvenflug.
Die folgenden Skizzen stellen verschiedene Konstruktionen zum Ausgleich des Drehmoments dar:
Frei drehender Heckrotor, in einer Stabilisierungsflosse integrierter Fan (Fenestron):
Gegenläufige Rotoren, ineinanderkämmende Rotoren:
08
09
Und eine Ausführung ohne Heckrotor (NOTAR, NoTail Rotor): Dabei wird die im Heckteil ausgestoßene Luftmasse für den Drehmomentausgleich genutzt.
Frühere Entwürfe zeigen den sogenannten Reaktionsantrieb über Düsen an den Rotorblattenden, wobei ein Rückdrehmoment unterblieb.
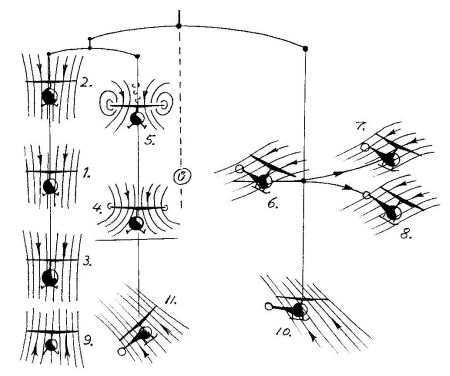
In den möglichen Flugsituationen weist der Rotorstrahl verschiedene Formen und Charakteristik auf.
10
11
So strömt die Luftmasse während des Stehenbleibens in der Luft (Hover-Flug) in symmetrischer Form durch den Rotorkreis. In Bodennähe wird der Strahl radial nach außen abgelenkt, der hier wirkende Bodeneffekt erhöht die Leistung.
Bei Fahrtaufname nimmt der Rotorstrahl zunehmend eine Schrägstellung ein, von vorne oben nach hinten unten. Dieser Zustand erbringt ab etwa einem Dutzend Knoten den sogenannten Übergangsauftrieb, eine weitere aerodynamisch bedingte Leistungssteigerung. Es kann allerdings jeweils nur einer der beiden Vorteile genutzt werden.
Die nächste Abbildung zeigt jeweils die veränderten Rotor- und Strahlgebilde.
12
13
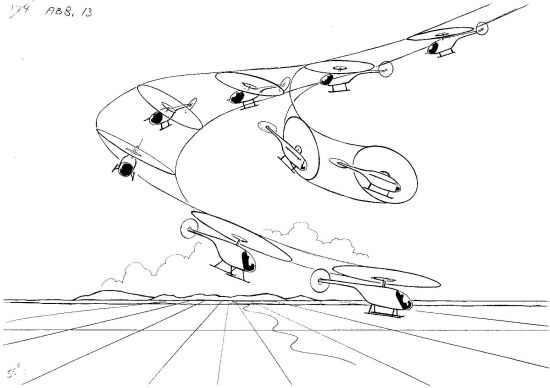
Die nächste Skizze stellt die verschieden Flugzustände des Drehflüglers dar. Bei Triebwerksausfall des einmotorigen Hubschraubers wird das Rotorsystem auf Autorotation umgestellt. Die Selbstdreheigenschaft ist auch in der Natur bekannt, nämlich durch das beflügelte Samenkorn des Ahornbaumes. Während beim sog. motorgetriebenen Flug die aerodynamischen Kräfte bremsend auf den Rotor wirken, treiben sie im Falle der von unten nach oben durch die Rotorkreisfläche strömende Luftmasse den Rotor an. Der Drehflügler bleibt mit etwas höherer Sinkrate noch voll steuerbar.
Flugphasen der Autorotation (Abbildung zeigt sogenannte „Fulldown Autorotation“ und „PowerRecovery“).
Die Zeichnungen sind aus dem Buch „Kleine Hubschrauberschule“ von Helmut Mauch entnommen. Herausgegeben im Aero-Verlag, Zuerl, Postfach 126, D-85236 Petershausen, www.aero-verlag.de, FAX 08137 – 21 64. Mit freundlicher Genehmigung von Helmut Mauch.
01
Leicht – und sich durch die Luft schrauben: das war auch schon die Idee von Leonardo da Vinci,wie die bekannte Skizze beweist:
Bis zur Realisation des heutzutage nicht mehr wegzudenkenden Hubschraubers bedurfte es unzähligen Versuchen und Entwicklungen. Dabei scheint technisch kaum ein Unterschied zu bestehen zwischen dem Starrflügler, der sich nur mit Vorwärtsfahrt im Luftmeer behaupten kann und dem Drehflügler, der in sämtliche Richtungen fliegen kann und auch senkrecht manövrierbar ist. Eines kann jedoch nur er: in der Luft stehen bleiben.
02
03
Der „interne“ technische Aufwand ist sehr komplex, jedoch auch für den Nicht- Hubschrauberflieger erfassbar. Während das Starrflügelflugzeug durch Fahrt mit seinen profilierten Flächen Auftrieb erhält, liefert beim Helikopter die rotierenden Auftriebsflächen – die Rotorblätter – die aufwärts gerichteten Kräfte. Bekanntlich lässt sich das Flugzeug um drei Bewegungsachsen aerodynamisch steuern, ebenso der Hubschrauber, der sich auch zusätzlich entlang dieser Achsen verschieben kann.
Diese enorme Beweglichkeit erfordert intensives Training und tiefe Kenntnis der Einsatzmöglichkeiten.
Der Rotor selbst funktioniert wie ein verstellbarer Propeller, mit dem der senkrecht wirkende Auftrieb variiert wird. Dies geschieht mit dem „Pitch“, einem separat mit der linken Hand zu bewegendem Hebel. So wird die Höhe z.B. über dem Boden kontrolliert. Diese Auftriebsleistung kann auch innerhalb der Rotorkreisfläche unterschiedlich verteilt werden. Hierzu können die Rotorblätter unabhängig einzeln „verdreht“ werden.
04
05
Die der Propellerverstellung ähnliche Einstellmöglichkeit wird „kollektive“ Steuerung genannt, gleichzeitig und gleich groß. Die während des Umlaufs gewährte Verstellmöglichkeit wird „zyklische“ oder „periodische“ Steuerung genannt. Durch letztere kann die gesamte Rotorkreisebene in die beabsichtigte Flugrichtung geneigt und dadurch Fahrt aufgeholt werden.
Die komplizierte Steuerung ist in der nächsten Abbildung stark vereinfacht dargestellt. Die Skizze beinhaltet auch die Steuerung eines weiteren Rotors, der für den Ausgleich des Drehmoments sorgt. Sobald der Hauptrotor in Umdrehung versetzt wird, äußert sich das Rückdrehmoment, welches den Rumpf in Gegenrichtung bewegen will. Diese Tendenz wird durch den hinteren Ausgleichsrotor kompensiert. Auch dieser Propeller ist über die Fußpedale verstellbar und ermöglicht Drehungen um den Rotormast.
06
07
Über den Steuerknüppel lenkt man analog zum Flächenflugzeug die Fluglage bezüglich der Nickbewegungen sowie der Schräglage wie z.B. im Kurvenflug.
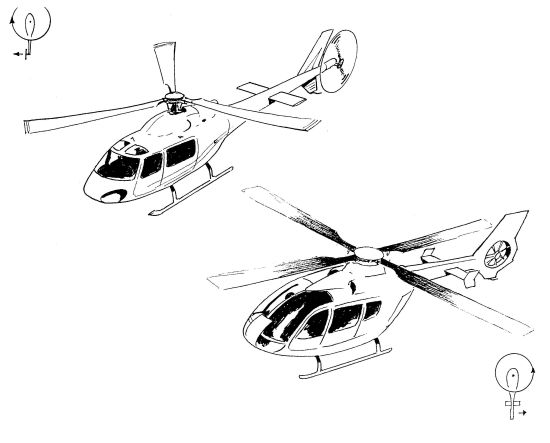
Die folgenden Skizzen stellen verschiedene Konstruktionen zum Ausgleich des Drehmoments dar:
Frei drehender Heckrotor, in einer Stabilisierungsflosse integrierter Fan (Fenestron):
Gegenläufige Rotoren, ineinanderkämmende Rotoren:
08
09
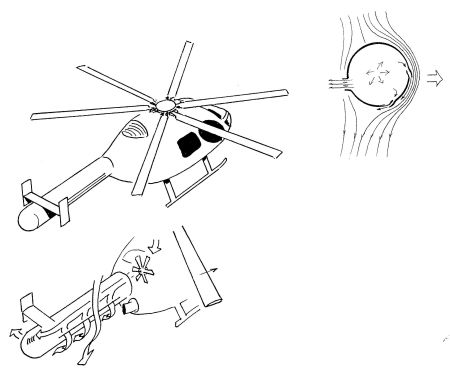
Und eine Ausführung ohne Heckrotor (NOTAR, NoTail Rotor): Dabei wird die im Heckteil ausgestoßene Luftmasse für den Drehmomentausgleich genutzt.
Frühere Entwürfe zeigen den sogenannten Reaktionsantrieb über Düsen an den Rotorblattenden, wobei ein Rückdrehmoment unterblieb.
In den möglichen Flugsituationen weist der Rotorstrahl verschiedene Formen und Charakteristik auf.
10
11
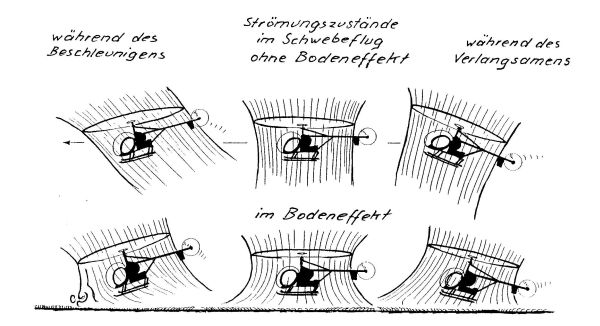
So strömt die Luftmasse während des Stehenbleibens in der Luft (Hover-Flug) in symmetrischer Form durch den Rotorkreis. In Bodennähe wird der Strahl radial nach außen abgelenkt, der hier wirkende Bodeneffekt erhöht die Leistung.
Bei Fahrtaufname nimmt der Rotorstrahl zunehmend eine Schrägstellung ein, von vorne oben nach hinten unten. Dieser Zustand erbringt ab etwa einem Dutzend Knoten den sogenannten Übergangsauftrieb, eine weitere aerodynamisch bedingte Leistungssteigerung. Es kann allerdings jeweils nur einer der beiden Vorteile genutzt werden.
Die nächste Abbildung zeigt jeweils die veränderten Rotor- und Strahlgebilde.
12
13
Die nächste Skizze stellt die verschieden Flugzustände des Drehflüglers dar. Bei Triebwerksausfall des einmotorigen Hubschraubers wird das Rotorsystem auf Autorotation umgestellt. Die Selbstdreheigenschaft ist auch in der Natur bekannt, nämlich durch das beflügelte Samenkorn des Ahornbaumes. Während beim sog. motorgetriebenen Flug die aerodynamischen Kräfte bremsend auf den Rotor wirken, treiben sie im Falle der von unten nach oben durch die Rotorkreisfläche strömende Luftmasse den Rotor an. Der Drehflügler bleibt mit etwas höherer Sinkrate noch voll steuerbar.
Flugphasen der Autorotation (Abbildung zeigt sogenannte „Fulldown Autorotation“ und „PowerRecovery“).
Die Zeichnungen sind aus dem Buch „Kleine Hubschrauberschule“ von Helmut Mauch entnommen. Herausgegeben im Aero-Verlag, Zuerl, Postfach 126, D-85236 Petershausen, www.aero-verlag.de, FAX 08137 – 21 64. Mit freundlicher Genehmigung von Helmut Mauch.